Projects

Monitoring bio-soft robot for minimally invasive surgery
The aim of the project was to develop a robotic monitoring system for minimally invasive surgeries. The system consisted of a collaborative robot, Franka Emika, and a custom continuum robot used as an end-effector.
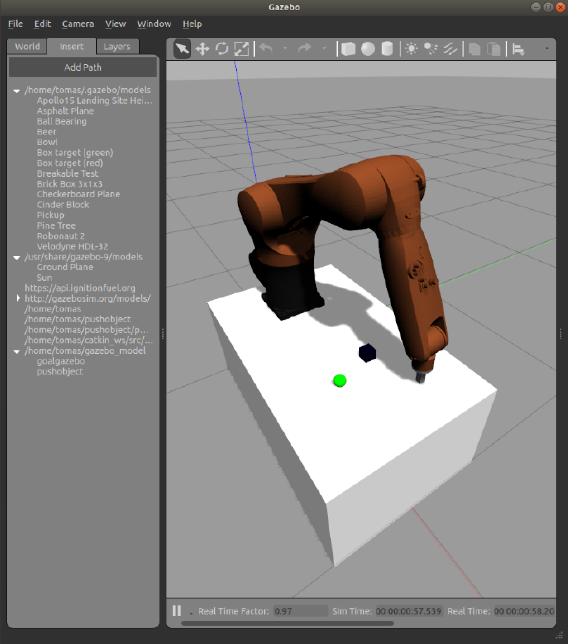
Reinforcement learning in robotic arm position control
Implementing the Soft Actor-Critic and Hindsight Experience Replay algorithms to solve two robotics environments created in ROS.
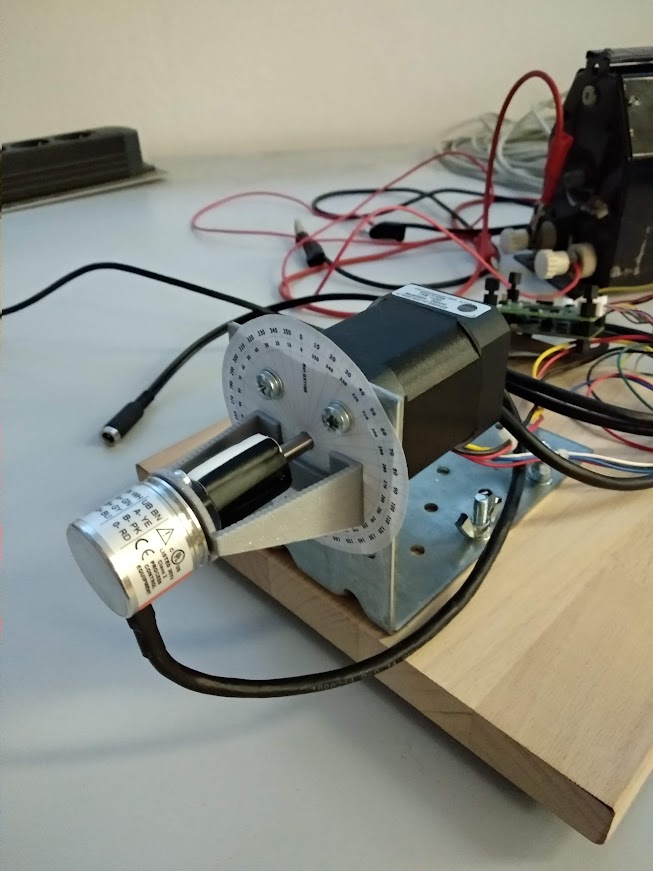
Field oriented control of PMSM
Implementing the position controller for a synchronous motor using a microcontroller by Texas Instruments.